Point cloud registration is the process of aligning multiple 3D laser scans into a single, cohesive point cloud model based on a unified coordinate system. This foundational step is essential within the professional AEC Scan to BIM workflow, with the ultimate goal of producing an accurate and reliable Revit model. By merging individual scans, which are each captured from a different vantage point, registration creates a complete and precise digital twin of a physical space or structure.
This guide will walk you through the critical role of point cloud registration in modern construction and design. We will explore its importance in ensuring data accuracy, how the registration process works, the primary methods used by professionals, and the common software that facilitates this transformative technology.

The Importance of Point Cloud Registration
Point cloud registration is a fundamental step in Scan to BIM workflows, as it guarantees the precision and reliability of the resulting BIM model. The process involves carefully aligning and merging multiple point cloud scans into a single, georeferenced dataset, which forms the basis of the BIM model. Without accurate registration, the model may contain errors, leading to design inaccuracies, construction clashes, costly rework, budget overruns, and schedule delays.
Properly executed point cloud registration is crucial for several reasons:
- Creates a Comprehensive Model: Individual 3D scans only capture a line-of-sight perspective. Registration is the only way to stitch these multiple perspectives together to form a complete, 360-degree representation of the entire project site, eliminating data gaps and blind spots.
- Ensures Data Accuracy: The primary goal is to achieve a high degree of accuracy, ensuring that the combined point cloud is a true-to-life representation of the as-built conditions. This accuracy is the bedrock upon which all subsequent design and construction decisions are made.
- Enables Precise Measurements and Analysis: Accurately registered point clouds establish a reliable foundation for precise measurements, clash detection, and advanced analysis within the BIM workflow.
- Ensures Smooth Integration: Proper registration allows point cloud data to integrate seamlessly with other BIM elements, supporting effective collaboration and streamlined information exchange among stakeholders.
- Supports High-Detail Modeling (LOD): For BIM models that demand higher Levels of Detail (LOD), precise registration is essential to capture fine structural details with accuracy.
Precise point cloud registration is the essential foundation of a reliable digital twin. At ViBIM, our Scan to BIM services ensure every aligned scan provides a flawless base for high-detail Revit models, eliminating design conflicts and ensuring project accuracy from the very start.

How does Point Cloud Registration Work?
Point cloud registration is the process of aligning multiple 3D scans into a single, accurate dataset, ensuring consistency and precision for BIM and other applications.
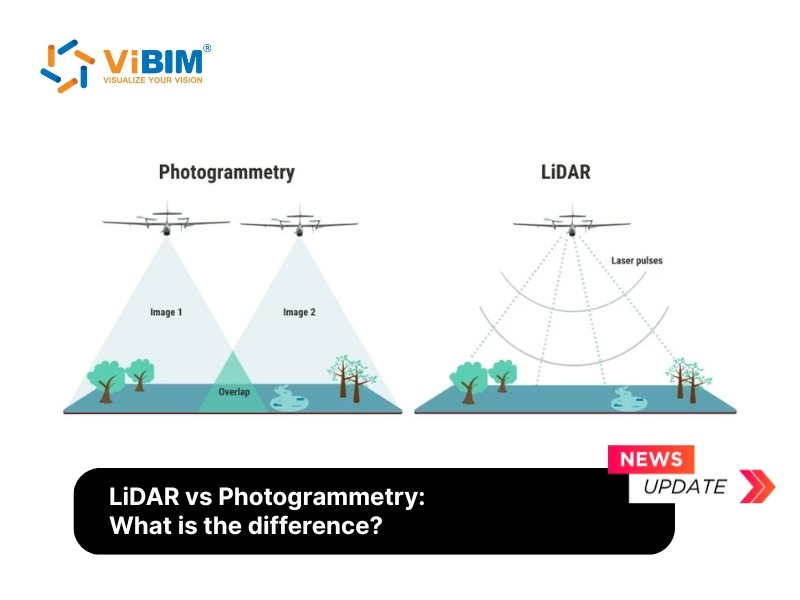
- Finding Correspondences: The process begins by detecting common features or points that overlap between individual scans. These correspondences can be artificial targets placed on-site (like spheres or checkerboards) or natural features inherent to the environment, such as the corners of walls, intersections of pipes, or other distinct geometric shapes. Sufficient overlap between scans is critical for identifying these common reference points.
- Estimating Transformation (Coarse Alignment): Once correspondences are identified, the software performs an initial, approximate alignment. It calculates the required rotation and translation (the “transformation”) to bring the scans into a rough alignment based on the common features. This step gets the scans into the correct general position relative to one another before a more precise refinement is applied.
- Iterative Refinement (Fine Alignment): Following the coarse alignment, advanced algorithms are used to perfect the alignment. Before this refinement stage, raw scan data often contains outliers and artifacts from reflective surfaces or environmental interference — issues addressed through 3d point cloud noise filtering to ensure the ICP algorithm converges on clean, reliable data. The most common is the Iterative Closest Point (ICP) algorithm, which iteratively adjusts the scans to minimize the distance between corresponding points, ensuring precision at the millimeter level. This process is repeated until the alignment error is reduced to an acceptable tolerance.
- Merging & Georeferencing: After all scans are accurately aligned, they are combined into a single, cohesive point cloud. During this stage, managing various point cloud file formats is necessary to ensure data remains compatible across different engineering platforms. This final dataset can then be georeferenced, which means it is aligned to a real-world coordinate system. This is a critical final step for large-scale projects, allowing the point cloud to be seamlessly integrated with other design and construction workflows. Once georeferenced, the registered dataset serves as the primary input for 3D point cloud modeling, where raw spatial data transforms into structured, intelligent geometry.
Understanding registration is essential for creating a unified dataset, but transforming that registered point cloud into an intelligent Revit model requires a different skill set—learn how to convert point cloud to BIM step-by-step.

Main Methods of 3D Point Cloud Registration
There are several established methods for registering point clouds, each with its own advantages and ideal use cases. The choice of method often depends on the project’s accuracy requirements, site conditions, and available technology.
Target-based Registration
Target-based registration is a process used in terrestrial laser scanning to align multiple scans into a single coordinate system by using physical targets placed within the scanning area. These targets, which can be spheres, black-and-white patterns, or other distinctive markers, are scanned and detected in the data. This method is fundamental to creating high-quality 3d laser scanning point cloud models for industrial sites. The registration algorithm uses the known positions of these targets to join or link adjacent scan worlds, allowing for precise alignment of the different scans.
While this method delivers very high accuracy, it requires careful planning and can be time-consuming on-site due to the need to place and move targets. Target-based registration is best applied when accuracy, reliability, and manual control are priorities, such as in professional surveying, engineering, construction, and industrial applications where precision and consistency are critical.

Point-to-point / Iterative Closest Point – ICP
The Iterative Closest Point (ICP) algorithm is the most common method used for the fine-tuning stage of registration. It works by iteratively adjusting the position and orientation of one point cloud (the source) to best match another (the reference). The algorithm finds the closest point in the reference cloud for each point in the source cloud and calculates the transformation (rotation and translation) that minimizes the average distance between these pairs. This process is repeated until the alignment error converges below a specified threshold. ICP is highly effective but requires a good initial coarse alignment to work correctly.
This technique is a fundamental tool across multiple domains such as robotics, computer vision, and 3D reconstruction. It plays a critical role in tasks like object recognition, localization, and mapping, enabling systems to better interpret and interact with complex real-world environments.

Feature Based
Instead of relying on individual points, feature-based registration identifies and matches larger, distinct geometric features within the point clouds. These features can include planes (walls, floors), cylinders (pipes, columns), and sharp edges or corners. By aligning these common geometric primitives, the software can achieve a robust registration, even in environments that lack distinct textures or where point density is inconsistent. This method can be more efficient and less computationally intensive than point-to-point methods.
Feature-based point cloud registration is a critical technique applied in diverse industries, including robotics, construction, industrial inspection, heritage preservation, autonomous driving, medical imaging, and multimodal data fusion. By leveraging distinctive geometric features to align 3D scans, it ensures high-precision mapping, accurate as-built modeling, reliable defect detection, detailed cultural reconstructions, and advanced surgical planning.

End-To-End based
End-to-End based registration methods are a recent advancement in image and point cloud registration that leverage deep learning and artificial intelligence to perform the entire registration process within a single integrated model. This evolution is a key component in the push for greater Scan to BIM automation within the industry. Unlike traditional methods, which often require separate stages like feature extraction, matching, and transformation estimation, end-to-end registration learns these steps jointly and optimally through one deep neural network.
This method is increasingly applied in 3D point cloud alignment, medical imaging, multimodal data fusion, robotics, autonomous driving, and AR/VR. By integrating feature extraction and transformation into a unified model, these approaches handle noisy or partial data, support real-time mapping and localization, enable precise medical analysis, and enhance immersive experiences. Their key advantage lies in improved speed, robustness, and accuracy, making them highly effective for complex, data-intensive applications.

Common Software for Point Cloud Registration
A variety of powerful software solutions are available to AEC professionals for processing and registering point cloud data. Selecting the best Scan to BIM software often depends on existing workflows, hardware compatibility, and project-specific needs.
- Autodesk ReCap: Known for its user-friendly interface, ReCap is a popular choice for reality capture projects. It integrates seamlessly with the broader Autodesk ecosystem, making it easy to bring registered point clouds into software like Revit, AutoCAD, and Navisworks for Scan-to-BIM workflows.
- Trimble RealWorks: This is a comprehensive software suite designed to process data from Trimble 3D laser scanners and other sources. It offers advanced registration, modeling, and analysis tools, providing a powerful end-to-end solution for surveyors and engineers.
- Leica Cyclone: A professional-grade software platform from Leica Geosystems, Cyclone is renowned for its high accuracy, control, and scalability. It consists of various modules, including Cyclone REGISTER 360, which provides a streamlined and efficient registration workflow.
- CloudCompare: A highly versatile and free open-source software, CloudCompare is a favorite in the academic, research, and professional communities. It offers a vast array of tools for point cloud and 3D mesh processing, including several powerful registration algorithms.

In conclusion, point cloud registration is not merely a technical step but the cornerstone of a successful Scan-to-BIM project. The integrity of every subsequent deliverable—from as-built drawings to a fully intelligent BIM model—depends on the precision achieved during this critical phase. By understanding the process, methods, and available tools, AEC professionals can ensure they are building their projects on a foundation of accurate and reliable data.
Ensure Precision from Registration to Final BIM Model
Accurate point cloud registration is only the foundation—transforming this aligned data into a high-quality, intelligent Revit model requires specialized expertise and rigorous quality control. Streamline your workflow with ViBIM’s professional Revit modeling outsourcing services to convert your registered point clouds into project-ready BIM deliverables with consistent accuracy and LOD compliance.